[b2_insert_post id=”https://www.3dscg.com/rhnio-download-luodideng.html”]
[b2_insert_post id=”https://www.3dscg.com/rhino-luodideng.html”]
高清视频请前往B站,ID 当厘子

[b2_insert_post id=”https://www.3dscg.com/rhnio-download-luodideng.html”]
[b2_insert_post id=”https://www.3dscg.com/rhino-luodideng.html”]
高清视频请前往B站,ID 当厘子

今天我们来学习Grasshopper的系列教程,今天要学习的内容是:射线和物体的相交
本节课的射线是指已知一个往不同方向发出生成的直线

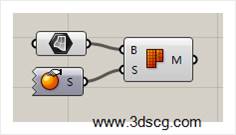
IsoVist:射线和物体相交
Grasshopper运算器左边的参数分别代表的是:
Grasshopper运算器左边的参数分别代表的是:

射线和物体碰撞的效果

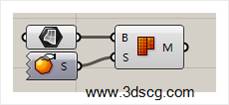
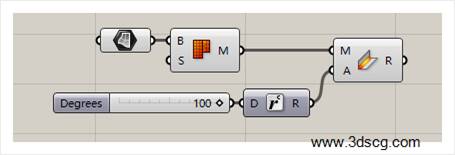
IsoVistRay:计算射线和物体相交,这个运算器和上一个基本类似,大家参考下面的算法来理解这个运算器。


[elementor-template id=”7418″]

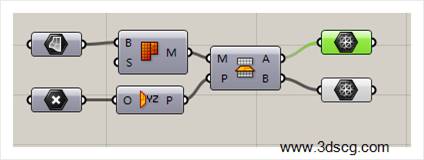
今天我们来学习Grasshopper的系列教程,今天要学习的内容是:物体和平面的相交
物体和平面的相交也是我们常用的计算相交线的方法,其中最最常用的是制作等高线,制作等高线,我们不但可以做地形上的等高线,也可以做建筑的楼层线,建筑外墙玻璃的分隔线这些都可以用等高线来制作。
注意事项:这节课案例中的平面并不是指平面曲面,而是一个无限大的参考平面

Brep| Plane:物体和平面相交
Grasshopper运算器右边边的参数分别代表的是:

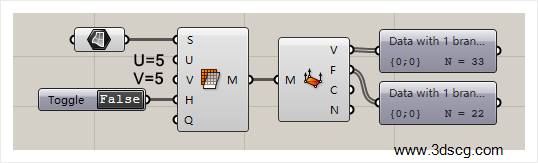
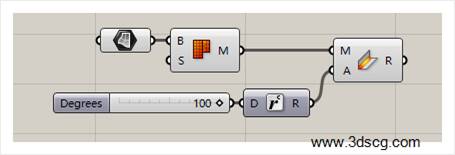
Contour:按照指定的方向生成等高线
Grasshopper运算器左边的参数分别代表的是:

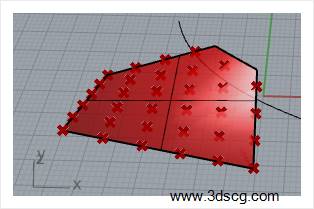
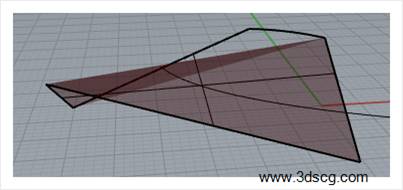
等高线的效果请看下图

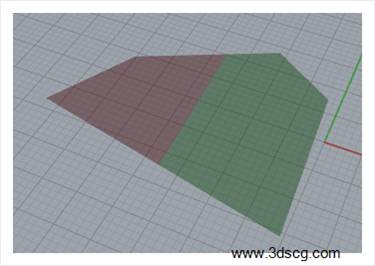
Contour (ex):等高线加强版
这个等高线的运算器是上一个等高线运算器的加强版,上一个运算器中间距只能输入一个值,而这个是可以输入多个值的,这样的话我们就可以完成一些非均匀划分的效果了,比如玻璃幕墙上面的划分,或者高层建筑防火层的区间划分这些类似的情况。
Grasshopper运算器左边的参数分别代表的是:

两种等高线算法产生的不同效果,左边是采用指定楼层高度的做法,右边是使用等差数列的算法

Curve | Plane:曲线和平面的相交
Grasshopper运算器右边边的参数分别代表的是:

曲线和平面相交的效果

Line|Plane:直线和平面相交
这个运算器和上面的运算器是类似的,这里不多加讲述了。

Mesh| Plane:网格和平面的相交
最终输出网格和平面的相交线

网格和平面相交线的效果请看下图。

Plane| Plane:平面和平面相交
如果两个平面是互成夹角的话,最终会输出一个直线

Plane|Plane| Plane:三个平面相交
Grasshopper运算器右边边的参数分别代表的是:

Plane Region:平面区域


[elementor-template id=”7418″]

8.1 一般规定
8.1.1 建筑施工中进度计划的编制和优化、施工进度的管理和控制等工作宜采用 BIM 技术。
8.1.2 进度计划编制 BIM 应用中应根据项目特点、工艺要求和进度控制需求,编制不同深度、不同周期的 进度计划。
8.1.3 进度控制 BIM 应用过程中,应对实际进度的原始数据进行收集、整理、统计和分析,并将实际进度 信息附加或关联到 BIM 模型中。
8.2 进度计划编制
8.2.1 进度计划编制中的工作分解结构创建、计划编制、与进度相对应的工程量计算、资源配置、进度计 划优化、进度计划审查、进度计划可视化等工作宜应用 BIM 技术。
8.2.2 在进度计划编制 BIM 应用中,可基于项目特点创建工作分解结构,并编制进度计划,可基于深化设 计模型创建进度管理模型,基于定额完成工程量和资源配置、进度计划优化,通过进度计划审查形成进度 管理模型。
8.2.3 将项目按整体工程、单位工程、分部工程、分项工程、施工段、工序依次分解,最终形成完整的工 作分解结构,并满足下列要求:
1 工作分解结构中的施工段应与模型关联;
2 工作分解结构详细程度应与进度计划匹配,并包含任务间关联关系;
3 在工作分解结构基础上创建的信息模型应与施工段、施工流程对应。
8.2.4 宜根据验收的先后顺序划分项目的施工任务及节点:
1 确定里程碑节点;
2 确定工作分解结构中每个任务的开工、完工日期及关联关系;
3 编制进度计划,确定关键线路。
8.2.5 进度管理模型宜包含工作分解结构信息、进度计划信息、资源信息和进度管理流程信息等。
8.3 进度控制
8.3.1 进度控制工作中的实际进度和计划进度跟踪对比分析、进度预警、进度偏差分析、进度计划的调整 等工作宜应用 BIM 技术。
8.3.2 施工过程中宜按一定周期收集项目的实际工程进度,与计划进度进行对比分析,输出项目的进度时 差;根据偏差分析结果,调整后续进度计划,并更新进度管理模型。
8.3.3 宜制定预警规则,明确预警提前量和预警节点,并根据进度分析信息,对应规则生成项目进度预警 信息;根据预警信息,调整后续进度计划,并更新进度管理模型。
8.3.4 进度控制中进度管理模型宜含有实际进度信息和进度控制信息。

高清视频请前往B站,ID :当厘子
[b2_insert_post id=”https://www.3dscg.com/rhino-download-reef.html”]

今天我们来学习Grasshopper的系列教程,今天要学习的内容是:直线和各种物体的相交
计算直线和物体的相交,可以让我们快速的得到直线和物体的相交点和这个点在物体上的位置关系。

Brep/Line:多重曲面和直线相交
多重曲面和直线相交之后,我们会得到直线和多重曲面的相交点


Curve / line:曲线和直线相交
Grasshopper运算器右边边的参数分别代表的是:

曲线和直线相交的效果,请看下图。

Line/ Line:直线和直线相交
Grasshopper运算器右边边的参数分别代表的是:

Mesh/ Ray:网格和射线相交
所谓的射线就是已知起点和方向的直线,这个运算器用于计算射线和网格之间的相交点。
Grasshopper运算器左边的参数分别代表的是:
<img title="1590562397.png" src="https://ww1.3dscg.com/img/2021/20211590562397.png" alt="计算机生成了可选文字: 0" 3dscgcom" />
Surface / Line:曲面和直线相交
Grasshopper运算器右边边的参数分别代表的是:

[elementor-template id="7418"]

[b2_insert_post id=”https://www.3dscg.com/rhino-video-fengtong-2.html”]
[b2_insert_post id=”https://www.3dscg.com/rhino-download-reef.html”]
今天我们用Rhino犀牛来建一个吹风筒,这个风筒造型有点特别,
像三管衔接也像裤子,下面我们来看看如何建这个吹风筒
注意所注英文即犀牛的快捷键,直接键盘敲出即可
首先,用LIne把中轴线和背景图导入BackgroundBitmap
调整好位置,大家可以通过BackgroundBitmap编辑背景图中缩放、移动来调整

调整好后,使用Line直线命令,勾出风筒外轮廓线

Tirm把多余部分剪切

使用BlendCrv混接曲线 命令,把两条轮廓线混接
参数为正切,并把两条弧线用Join组合

切换至透视图,用Circle圆形命令画出截面线

Sweep2双轨扫掠命令,把曲线生成曲面

在前视图中,用Curve曲线命令,勾出曲线

再用Trim剪切命令,把上部分剪切掉

切换至透视图,在顶部第二条中轴线上用Circle画圆形

点击坐标轴上的实心点向上拉扯,把圆形变成曲面

用Line直线画出两个物体间的外轮廓线

用NetworkSrf建立网格曲面命令生成曲面,参数如下图所示

把上面管状曲面删除,选择曲线,按住Shift键拉控制杆向里缩小
再向下移动

点击坐标轴上的实心点向下拉扯,把圆形变成圆管状

用BlendSrf混接曲面命令 把两个曲面混接

切换至前视图,用Curve曲线 描出风口外轮廓线
注意曲线要断开画,即画好一条按空格键再画一条

选择这几条曲线用Revolve旋转成型

选择曲面,其他隐藏Hide,用OffsetSrf向内偏移1mm厚曲面


在前视图用Rectangle矩形(选择圆角)画一个圆角矩形
再把它ExtrudeCrv拉伸

把这个拉伸出的圆角矩形用ArrayPolar环形阵列旋转复制64个

使用BooleanDifference布尔运算差集 命令

接下来 画风筒口,先在风筒口设置平面视图三点定位

在风筒口以中心点为起点画一个Rectangle圆角矩形
再向上移动15mm

按住其坐标轴的实心点向上拉扯,变成管状

用BlendSrf混接曲面,把两个曲面混接
注意选择连锁边缘

接下来做另一边把手部分,方法同上,同样设置平面视图三点定位
以中心点为起点画一个Rectangle圆角矩形后向上移动8mm
按住其坐标轴的实心点向上拉扯,变成管状
用BlendSrf混接曲面,把两个曲面混接
注意选择连锁边缘

两个裤腿用Join组合,再用Cap加盖


在把手上位置画一条直线

这条直接用 ExtrudeCrv拉伸

使用BooleanSplit布尔运算切割,把把手切开
再用FilletEdge命令对两个物体建立圆角

在视图左上角点箭头选择复原工作平面更改

这个做法也跟把手那边是一样的

完成后复原工作平面更改,上部分也是用同样的方法做出细节

设置工作平面三点定位到下面所示位置

在这个地方画一个圆角矩形为按钮,尺寸自定

把圆角矩形Project投影 到把手上,再用用Split切割

把切割出的圆角矩形用OffsetSrf偏移曲面 向里偏移2mm
再将其Explode炸开,表面曲面删除,把里面所有面加外壳
用Join组合,再用FilletEdge把边缘建立圆角,成图如下

再把一开始画的圆角矩形,移动到按钮里,用ExtrudeCrv向外拉伸

把按钮FilletEdge建立圆角再分成四份,画三条直线拉伸成面
用BooleanSplit布尔运算切割出来,边缘用FilletEdge建立圆角,成图如下

吹风筒完成图如下


今天我们来学习Grasshopper的系列教程,今天要学习的内容是:网格面小工具3

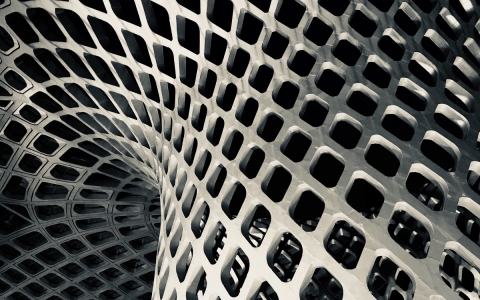
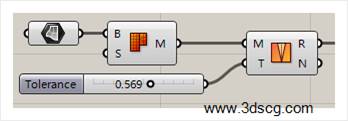
Align Vertices:对齐网格内部的点
对其网格内部的点实际上是对这个英文单词的直译,当然,实际上经过我的研究,这个运算写作用实际上是通过一个引力大小来拟合网格点内部的点。
在下图当中t的值等于0.569,那模型是没有任何变化的,当t等于4.536的时候,模型会发生改变
在下图当中我们可以看到0.569它是模型本身的样子,而在4.536的时候,模型左边的顶角发生了一些变化,各位同学依据这个变化独立思考一下。
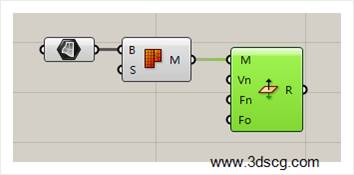
FLip Mesh:翻转网格的方向
这个和翻转曲面的方向是一样的,这里就不多做解释了。
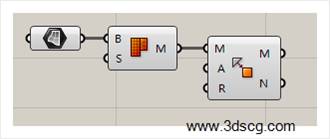
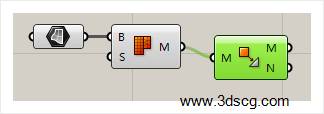
Quadrangulate:把网格的三角面转化为4边面
网格曲面可以由三角面构成,也可以由四边面构成,这个运算器就是把三角面转化为4边面
Triangulate:把网格的4边面转化为三角面
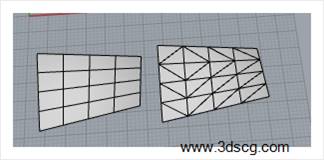
网格面的转化效果
左边是网格四边面的效果,右边是网格三角面的效果
Unify Mesh:统一网格面的方向
这个运算器可以让有些方向不对的网格面统一成一致的网格面方向。
大家如果对su熟悉的话,就会发现有些su的模型,它的面片的方向是反的,当用这些模型输入到犀牛的时候,那我们要对它的面的方向做一个整体的统一,使用这个运算器可以给我们节省大量的时间。

Unweld mesh:取消网格的焊接
Weld mesh:焊接网格,焊接网格主要的作用是拟合网格内部点,拟合网格内部点之后,会使网格点、面的数量降低,起到优化模型的作用。
[elementor-template id=”7418″]
今天我们来学习Grasshopper的系列教程,今天要学习的内容是:网格的操作
网格的操作是关于网格内部点的选取,网格内部面的选取或者删减等等一系列操作。这一部分操作和我们前面学习的集合的筛选删减等操作是类似的,大家也可以翻回之前学习的内容,结合的一起学习,这样学习效果更佳。

Blur mesh:模糊网格点的着色
这个运算器用于模糊网格点表面的颜色,通过i值改变模糊的程度。
0.450时的效果

0.660时的效果
Cull faces:删除面片
按照true和false的规则来删除面片
Cull vertices:删除点
也是true和false的规则来删除点
Delete faces:按照面的序列号来删除面片
面片的删除效果
Delete vertices:按照点的序号删除点
Disjoint Mesh:网格面断开连接
这个运算器表面的意思就是断开曲面之间的连接,但是实际测试效果却是不可行的,具体原因不明,有可能是软件开发的bug。
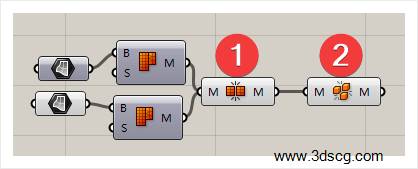
Mesh join:组合网格面
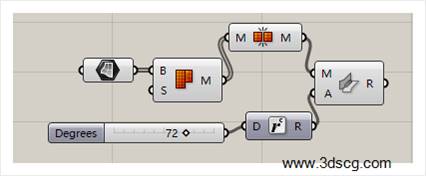
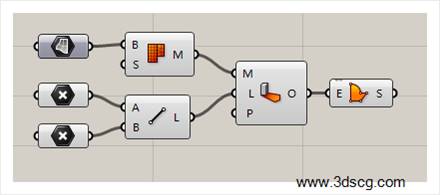
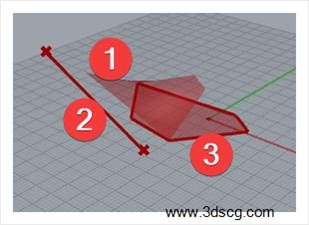
Mesh shadow:网格的投影
这个运算器可以模拟太阳光照投影的效果
Grasshopper运算器左边的参数分别代表的是:
\1. 要做投影的网格曲面
\2. 太阳光直射的方向,这里只要输入一条直线就可以了
\3. 影子的参考平面,一般xy平面就可以了
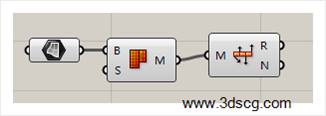
Mesh Split Plane:用平面来分割网格曲面
在下图中我们用一个yz平面来切割网格曲面让它分为两个网格曲面。
Smooth mesh:平滑网格曲面

[elementor-template id=”7418″]
7.1 一般规定
7.1.1 混凝土预制构件、钢结构构件、机电产品等数字化加工宜采用 BIM 技术。 7.1.2 预制构件加工模型宜在深化设计模型基础上创建。
7.1.3 预制构件宜采用条形码、二维码、射频识别(RadioFrequencyIdentification, RFID)等电子标签标识。 7.1.4 预制构件加工 BIM 交付成果宜包括:加工模型、加工图,以及产品模块相关技术参数和安装要求、 产品运输及成品、半成品保护要求等信息。
7.2 混凝土预制构件 BIM 应用
7.2.1 宜基于深化设计模型和生产及设计文件等完成混凝土预制构件生产模型创建,通过提取生产料单和 编制排产计划形成构件生产所需资源配置计划和加工图,并根据不同生产方式提取所需信息。
7.2.2 混凝土预制构件生产 BIM 应用交付成果宜包括混凝土预制构件生产模型、加工图,以及构件生产相 关文件。
7.2.3 宜针对产品信息建立标准化构件编码体系和生产过程管理编码体系。
7.3 钢结构构件加工 BIM 应用
7.3.1 钢结构加工模型应以深化设计模型为基础,其结构定位信息、材料属性信息、图纸信息等应与深化 设计模型保持一致,并补充钢结构构件加工所需的生产批次信息、工序工艺、工期成本信息、质检信息、 生产责任主体等信息。
7.3.2 应通过加工过程中各类信息的不断采集,完善钢结构加工模型的内容,实现施工过程的追溯管理。 7.3.3 编制材料采购计划应从钢结构加工模型中提取材料信息,通过排版套料为采购计划的编制提供依据, 并应符合相关技术、工艺文件的要求。
7.3.4 钢结构构件的原材料应按照采购计划的要求使用,因故出现材料代用时,应及时更新钢结构加工模 型中的材料信息,保证材料信息的准确性。
7.3.5 钢结构构件加工模型为钢结构现场安装提供构件相关技术参数和安装要求等信息。一般钢结构加工 产品安装、物流运输 BIM 应用模式如下:
1 钢结构加工产品运输到达施工现场,读取电子标签、二维码等信息,获取物料清单及装配图;
2 现场安装人员根据物料清单检查装配图,确定安装位置;
3 安装结束后经过核实检查,安装完成状态信息实时附加或关联到 BIM 模型,有利于钢结构加工产品 的全生命周期管理。
7.4 机电专业预制加工
7.4.1 机电专业预制加工是将机电专业管道、管件、部件、设备等根据现场施工需求进行模块化预制加工。 7.4.2 机电专业根据预制加工内容可划分为机房预制加工、全机电专业预制加工、局部预制加工等。
7.4.3 机电专业预制加工 BIM 模型需经过建设单位、设计单位等审核通过后进行工厂预制加工。 7.4.4 机电专业因预制加工导致原设计系统连接方法发生改变的,需经原设计院审批后再进行预制加工。
7.4.5 机电专业预制加工需要结合现场施工需求、安装工艺、吊装运输等确定模块的组合及划分。 7.4.6 机电专业预制加工图纸需根据审批通过后的 BIM 模型结合数字化加工设备进行加工图制作。
7.4.7 机电专业预制加工模块可采用二维码、无线射频识别等技术进行编码,预制加工模块编码应具有唯 一性。
7.5 其他预制 BIM 应用
7.5.1 在其他预制构件生产前,宜进行现场实测,调整加工 BIM 模型。 7.5.2 宜基于调整后的 BIM 模型和生产文件完成其他预制构件的生产模型创建,其他预制构件 BIM 模型应 在各专业协同合作下建立,保证预制构件的合理性。
7.5.3 其他预制构件 BIM 模型应能生成构件加工图,并支持常用加工系统、预制生产控制系统。
7.5.4 宜针对产品信息建立标准化构件编码体系和生产过程管理编码体系。