今天我们来学习Grasshopper的系列教程,今天要学习的内容是:曲线和曲面之间的相交.
曲线和曲面之间的相交能让我们快速的获取他们的相交点和这个点的一些参数,比如点的坐标点在曲面上的法线方向等等。

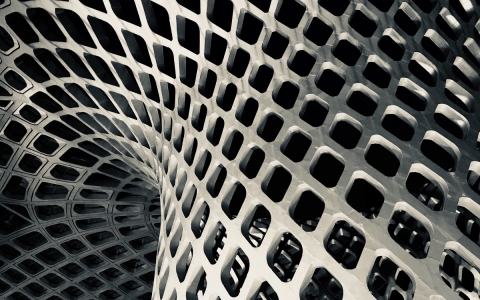
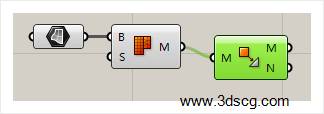
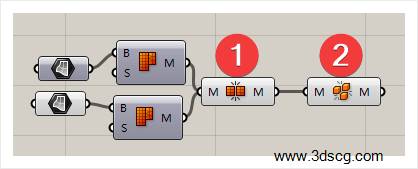
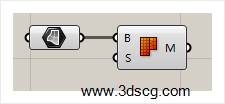
Brep| Brep:曲面和曲面相交
Grasshopper运算器右边边的参数分别代表的是:输出相交的曲线和点


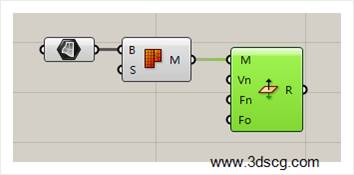
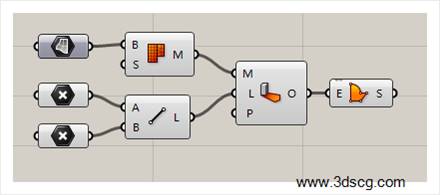
Brep| Curve:多重曲面和曲线相交。
Grasshopper运算器右边边的参数分别代表的是:输出相交的曲线和点。

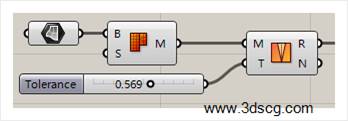
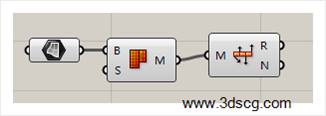
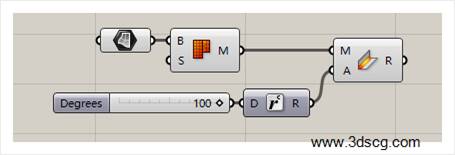
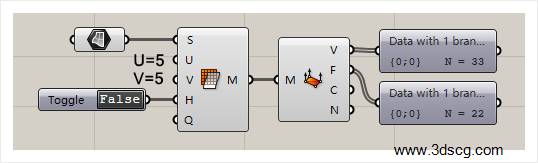
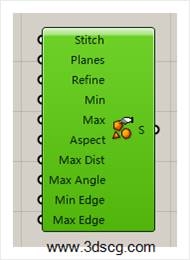
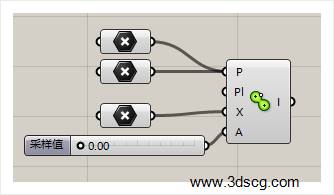
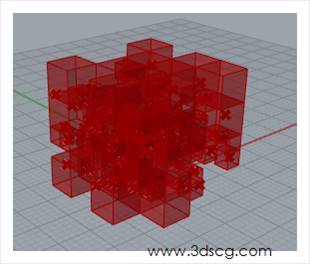
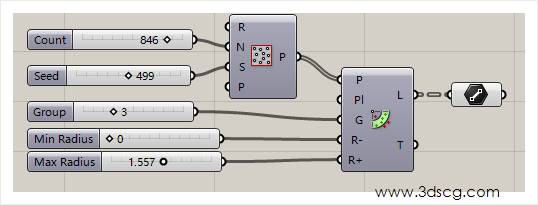
Surface| Curve:曲面和曲线相交
Grasshopper运算器右边边的参数分别代表的是:
- 在曲面上的曲线,这个案例当中曲线是穿过曲面的,所以这个端口是没有输出在曲面上的曲线
- 曲面和曲线的相交点
- 相交点的UV值
- 相交点在曲面上的法向方向
- 相交点在曲线上的位置值
- 相交点在曲线上的切线方向

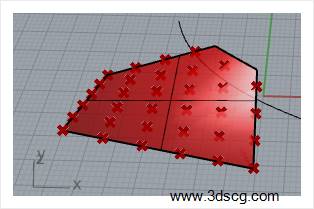
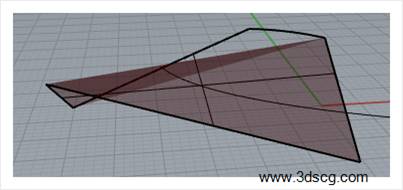
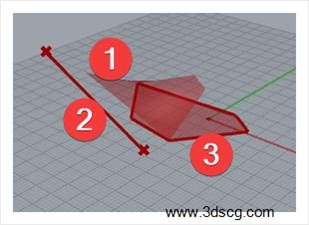
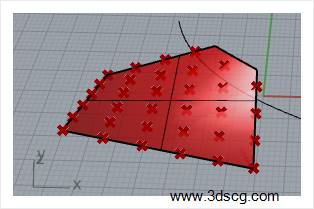
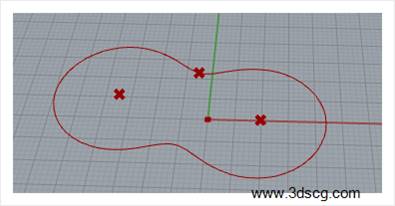
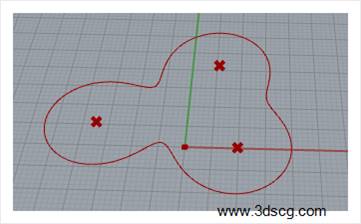
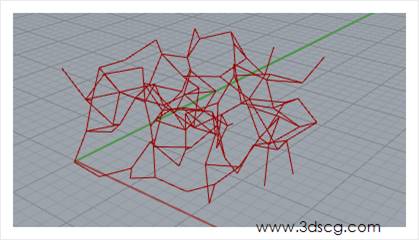
曲线和曲面相交的效果如下图所示

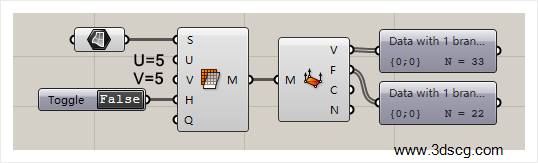
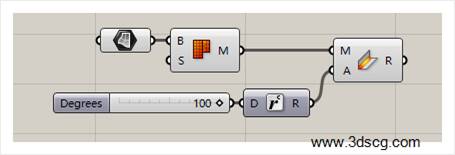
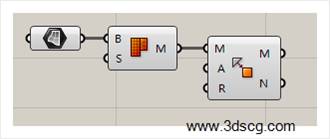
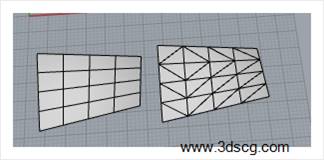
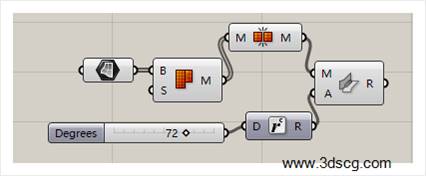
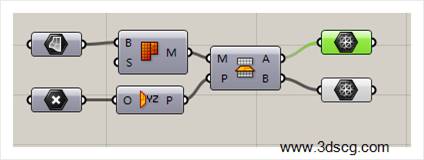
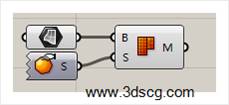
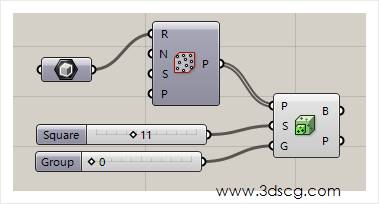
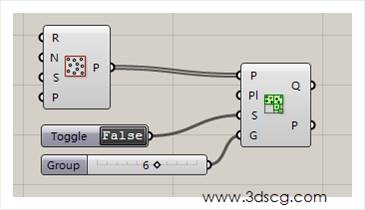
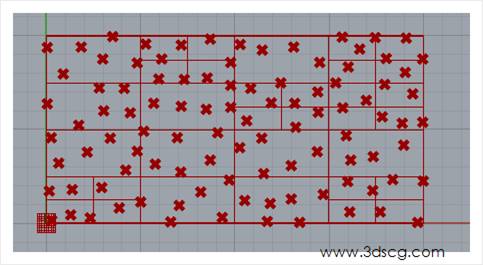
Surface Split:分割曲面
当曲线被投影到曲面之后,可以使用分割曲面这个运算器,把曲面分割为多个部分。
这里要注意的是,曲线没有投影到曲面上,其实也是可以分割曲面的,但是会出现一个错误的结果。
分割曲面之后,我们要用分流运算器或者筛选运算器把曲面分开。

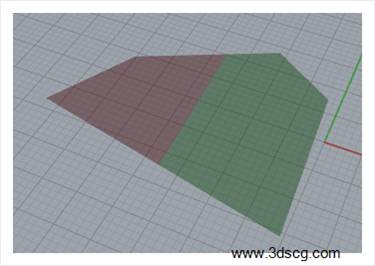
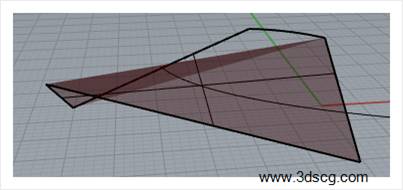
分割曲面后的效果。

[elementor-template id=”7418″]